برتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیکبرتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیکخمکاری در صنعت ورقکاری و مقادیر صحیح خم در Sheet Metal نرم افزار SolidWorks
در صنعت ورقکاری برای تغییر فرم در قطعات از فرآیند خم کاری استفاده می شود. خم کردن عملی است که درآن قسمتی از مواد را با حفظ سطح مقطع شان تا حد امکان با رساندن حرارت و بدون آن از مسیر اصلی خارج کرده و به مسیر دلخواهی آورد. در خمکاری ورق های فلزی اگر ضخامت ورق مساوی یا کم تر از 1.5mm باشد نیازی به محاسبه قطر یا شعاع متوسط نیست و محاسبه گسترده قوس ها با توجه به همان اندازه موجود در نقشه انجام می شود.
طراحی، مونتاژ و شبیه سازی چرخدنده مخروطی در نرم افزار سالیدورکس
شبیه سازی و آنالیز حرکت در نرم افزار سالیدورکس
طراحی و مونتاژ زنجیر در نرم افزار سالیدورکس
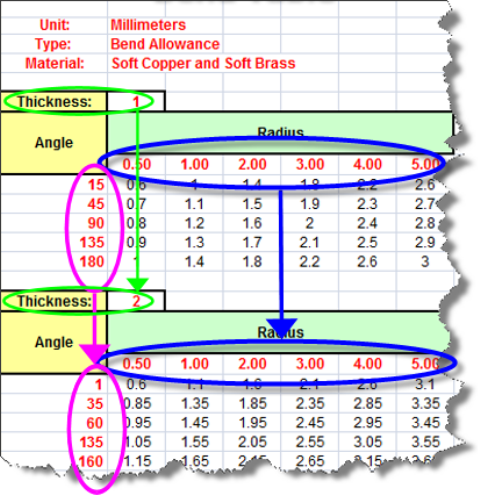
در صورتی که ضخامت ورق از 1.5mm بیش تر باش، با توجه به شعاع خمش و زاویه خمکاری می بایست ابتدا قطر متوسط را محاسبه کرده و طول گسترش قوس ها را به دست آورد. طراحی مکانیکی بایستی مطابق با واقعیت باشد. برای اینکه خمکاری در نقشه گسترده پس از اجرا اندازه های درست بدهد نیاز به مقادیر تجربی نیز داریم. این مقادیر در فیلم آموزشی در دو قسمت (به زبان انگلیسی و در محیط نرم افزار SolidWorks) آموزش داده شده است...
طراحی و مدلسازی رینگ چرخ خودرو در نرم افزار سالیدورکس
شبیه سازی حرکت مکانیزم در نرم افزار سالیدورکس
طراحی و مدلسازی پوسته حلزونی و پره های داخل توربین در نرم افزار سالیدورکس
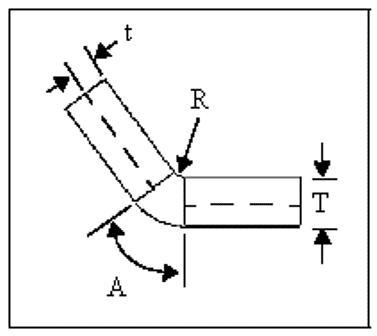
Bend allowance with a K-Factor is calculated as follows
BA=pi(R + KT) A/180
BA = bend allowance
R = inside bend radius
K = K-Factor, which is t / T
T = material thickness
t = distance from inside face to neutral sheet
A = bend angle in degrees - the angle through which the material is bent
آموزش کامل ورقکاری در نرم افزار سالیدورکس
طراحی و مدلسازی چرخدنده ساده در نرم افزار سالیدورکس
طراحی و مدلسازی میل لنگ در نرم افزار سالیدورکس
جهت دانلود ویدیو آموزشی خمکاری در صنعت ورقکاری و مقادیر صحیح خم در Sheet Metal نرم افزار SolidWorks برلینک زیر کلیک نماید:
آموزش کامل طراحی قالب های تزریق پلاستیک با استفاده از نرم افزار سالیدورکس
طراحی و مدلسازی تایر تراکتور در نرم افزار سالیدورکس
طراحی و مدلسازی توپ 40 تیکه در نرم افزار سالیدورکس
طراحی و مدلسازی بطری آدکلن در نرم افزار سالیدورکس
نحوه استفاده از دستور مرکز جرم در نرم افزار سالیدورکس
آموزش کامل انیمیشن سازی در نرم افزار سالیدورکس
طراحی و مدلسازی چرخدنده ساده اینولوتی در نرم افزار سالیدورکس
طراحی پروسه ماشینکاری و استخراج جی کد با نرم افزار سالیدکم
طراحی و مدلسازی بطری نوشابه در نرم افزار سالیدورکس
طراحی و مدلسازی قاب فن در نرم افزار سالیدورکس
کتاب مهندسی انرژی بادی (Wind Energy Engineering)
از آنجاییکه زمین بطور نامساوی به وسیله نور خورشید گرم میشود بنابراین در قطبها انرژی گرمایی کمتری نسبت به مناطق استوایی وجود دارد همچنین درخشکیها تغییرات دما با سرعت بیشتری انجام میپذیرد و بنابراین خشکیهای زمین نسبت به دریاها زودتر گرم و زودتر سرد میشوند. این تفاوت دمای جهانی موجب به وجود آمدن یک سیستم جهانی تبادل حرارتی خواهد شد که از سطح زمین تا هوا کره، که مانند یک سقف مصنوعی عمل میکند ادامه دارد.
اجزاء و عملکرد نیروگاه هسته ای
تولید برق بوسیله انرژی جزر و مدی
محاسبات و طراحی سیستم سردخانه 35000 نفری

بیشتر انرژی که در حرکت باد وجود دارد را میتوان در سطوح بالای جو پیدا کرد جایی که سرعت مداوم باد به بیش از ۱۶۰ کیلومتر در ساعت میرسد و سرانجام باد انرژی خود را در اثر اصطکاک با سطح زمین و جو از دست میدهد. یک برآورد کلی اینگونه میگوید که ۷۲ تراوات (TW) انرژی باد بر روی زمین وجود دارد که پتانسیل تبدیل به انرژی الکتریکی را دارد و این مقدار قابل ترقی نیز هست.
خانه هوشمند
سیستم های خنک کنندگی نیروگاه
بررسی نکات نصب و راه اندازی آسانسور

کتاب مهندسی انرژی بادی (Wind Energy Engineering)، که یکی از منابع معتبر در این ضمینه می باشد، اطلاعات جامعی در خصوص استفاده از انرژی باد به عنوان یک منبع انرژی قابل دوام و مقرون به صرفه می دهد. ویژگی یک رویکرد چند رشته ای، مهندسی انرژی باد را شکل می دهد که شامل: فیزیک، هواشناسی، آیرودینامیک توربین، اندازه گیری سرعت باد، مشخصات توربین بادی، برق و ادغام با شبکه می باشد. این کتاب مشتمل بر 354 صفحه، در 14 فصل، به زبان انگلیسی، همراه با تصاویر که برخی از مباحث زیر در آن مطرح می شود:
- کسب و کار از انرژی باد در سراسر جهان
- برق و اصول اولیه ژنراتور
- توربین بادی اجزای ژنراتور
- استقرار توربین های بادی در شبکه
- آیرودینامیک پره توربین بادی
- اصول اولیه انرژی بادی
- ارزیابی منابع بادی و... به ترتیب زیر گردآوری شده است:
Chapter 1: Overview of Wind Energy Business
Chapter 2: Basics of Wind Energy and Power
Chapter 3: Properties of Wind
Chapter 4: Aerodynamics of Wind Turbine Blades
Chapter 5: Advanced Aerodynamics of Wind Turbine Blades
Chapter 6: Wind Measurement
Chapter 7: Wind Resource Assessment
Chapter 8: Advanced Wind Resource Assessment
Chapter 9: Wind Turbine Generator (WTG) Components
Chapter 10: Basics of Electricity and Generators
Chapter 11: Deploying Wind Turbines in Grid
Chapter 12: Environmental Impact of Wind Projects
Chapter 13: Financial Modeling of Wind Projects
Chapter 14: Planning and Execution of Wind Projects
تحلیل سیستم هیدرولیک و حرکت لودر
طراحی سیستم های هیدرولیک
هیدرولیک و کاربردهای مهندسی

جهت دانلود کتاب مهندسی انرژی بادی (Wind Energy Engineering) برلینک زیر کلیک نمایید:
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
طراحی دستگاه مولـد فشار و خلاء
طراحی مخازن نفت براساس استاندارد API
طراحی سیستم جمع آوری و دفع فاضلاب ، ونت و آب باران در ساختمان های مسکونی
محاسبه ضربه قوچ در خطوط انتقال سیال
توربو شفت ها
گزارش کارآموزی نیروگاه گازی
طراحی و شبیه سازی مبدل های حرارتی
سیستم های پنیوماتیکی
سیستم های هیدرولیکی
کتاب آموزش جامع شبیه سازی فرآیند با نرم افزار HYSYS
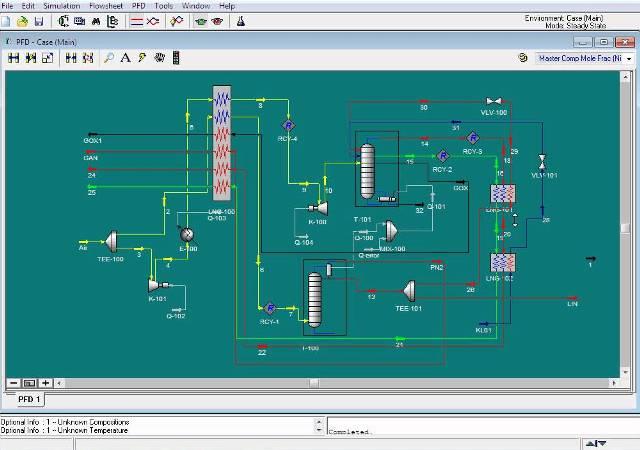
نرم افزار HYSYS به دلیل اینکه تمامی فرآیندهای نفت و گاز، پتروشیمی و مکانیکی بسیاری از فرآیندهای موجود در صنایع تولیدی را تحت پوشش قرار می دهد و همچنین توانایی مدلسازی آن برای حالت های پویای (دینامیک) فرآیندهای بسیار بالاست، ساده و سریع می باشد، لذا به عنوان یکی از نرم افزارهای جامع و پرکاربرد در زمینه مهندسی فرآیند مطرح است. با نرم افزار HYSYS می توان عملیات مجتمع را به سرعت بهبود بخشید و از درستی کارکرد دستگاه ها اطمینان حاصل کرد. در نرم افزار HYSYS عملیات واحدهای متعدد و گوناگونی مانند انواع مبدل های حرارتی، تجهیزات دوار مانند پمپ، کمپرسور، جداکننده ها، برج های تقطیر، راکتورها، عملیات جداسازی جامدات و عملیات منطقی موجود است. به علاوه عملیات واحد خاص را نیز می توان از طریق برنامه نویسی به این نرم افزار اضافه کرد. کلیه واکنش های شیمیایی مورد نیاز برای یک فرآیند یک بار نوشته شده و در طول برنامه هرجا که مورد نیاز باشند استفاده قرار می گیرند.
ABAQUS
منظور از مدل سازی فرآیند توصیف ماهیت سیستم تولید (موازنه های جرم و انرژی) در قالب معادلات ریاضی است. این معادلات عموماً غیرخطی و به شکل معادلات جبری، دیفرانسیلی و یا مخلوط آنهاست که این معادلات همگی به صورت اطلاعات کتابخانه ای در نرم افزارهای شبیه سازی ذخیره شده اند که از کنار هم قرار دادن این معادلات، مدلی از فرآیند ساخته می شود و منظور از شبیه سازی فرآیند یعنی بدست آوردن اطلاعات خروجی (به طور مثال مشخصات محصول) از طریق حل مدل های فوق براساس اطلاعات ورودی (به طور مثال مشخصات خوراک) و اطلاعات مربوط به مشخصات دستگاه های فرآیندی است...
Fluent & Gambit
CATIA
SolidWorks
کتاب آموزش جامع شبیه سازی فرآیند با نرم افزار HYSYS، یکی از کتاب های مفید و کاربردی در زمینه آموزش نرم افزار HYSYS می باشد. این کتاب مشتمل بر 162 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی، با فرمت PDF، به ترتیب زیر گردآوری شده است:
فصل اول:
- تعریف مدل سازی و شبیه سازی فرآیندها
- آشنایی با قابلیت های نرم افزار HYSYS
- معرفی محیط های اصلی و داخلی کار با نرم افزار HYSYS
- انتخاب روش ترمودینامیکی مناسب برای شبیه سازی فرآیند های مختلف
- آشنایی با ساختار های مختلف Fluid Pkg
- آشنایی با طریقه ساختن فهرست مواد و تعیین معادلات ترمودینامیکی
فصل دوم:
- روش ساختن ترکیبات جدید در HYSYS
- آشنایی با ابزارها و محیط شبیه سازی HYSYS و کار در محیط PFD
- شبیه سازی پمپ ها
- شبیه سازی کمپرسورها
- تمرین ها
فصل سوم:
- گزارش گیری از شبیه سازی
- آشنایی با تجهیزات انتقال حرارت در HYSYS
- شبیه سازی کولرها و هیترها
- شبیه سازی مبدل های حرارتی
- تمرین ها
فصل چهارم:
- شبیه سازی مبدل های حرارتی چند جریانی LNG
- شبیه سازی کولرهای هوایی
- شبیه سازی کوره
- آشنایی با بهینه سازی فرآیندها با حل یک مثال نمونه از بهینه سازی مبدل های حرارتی
- تمرین ها
فصل پنجم:
- آشنایی با انواع مختلف واکنش های قابل تعریف در HYSYS
- شبیه سازی راکتورهای شیمیایی
- تمرین ها
فصل ششم:
- آشنایی با مفهوم Gase Study همراه با حل یک مثال نمونه برای راکتورها
- آشنایی با انواع مختلف برج ها و محیط شبیه سازی برج ها در HYSYS
- تمرین ها
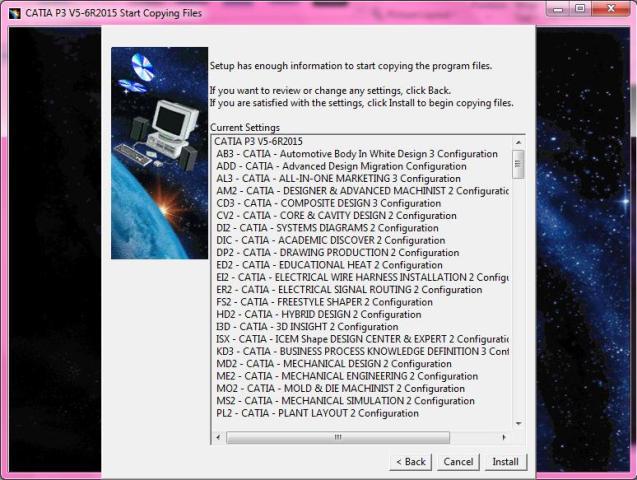
راهنمای نصب و کرک نرم افزار CATI A V5-6 R2014 و CATIA V5-6 R2015
نصب
نرم افزار کتیا دغدغه خیلی از کاربران و به خصوص تازه کارها می باشد. در
صورتیکه حتی یک مرحله را اشتباه انجام دهید، مجبور خواهید بود سیستم عامل
خود را مجددا نصب نمایید و یا اینکه از ورژن دیگر نرم افزار کتیا استفاده
کنید. بایستی بدانید نصب نرم افزار کتیا بسیار آسان بوده و حداکثر 40 دقیقه
زمان خواهد برد. پیشنهاد می گردد مراحل نصب نرم افزار پیشرفته کتیا را
مطابق با جزوه ای که توسط مهندس رسول محمدی (34 صفحه و با فرمت pdf) در این
زمینه گردآوری شده است دنبال نمایید. لازم به ذکر است که این آموزش جهت
نصب نرم افزار CATIA V5-6 R2014 و CATIA V5-6 R2015 می باشد. در این جزوه
آموزشی علاوه بر مراحل نصب نرم افزار کتیا (که همراه با تصویر می باشد)، 6
سوال متداولی که به ترتیب زیر برای اکثر کاربران کتیا پش می آید پاسخ داده
شده است:
سوال 1: چرا گزینه Save پس از نصب نرم افزار خاموش می باشد؟
سوال 2: چرا در صفحه List of Available Configurations Of Products هیچ گزینه ای روشن نمی باشد؟
سوال 3: برنامه کتیا را اجرا میکنم، ولی گزینه های صفحه List of Available Configurations Of Products غیر فعال است؟
سوال 4: موقع اجرای کتیا با خطای "No warm Start available, Click ok to terminate" مواجه می شوم؟
سوال 5: بعد از هر بار خاموش و روشن کردن سیستم وقتی کتیا را اجرا میکنم، گزینه های قسمت List of Available Configurations Of Products دوباره غیر فعال است؟
سوال 6: چطور چند نسخه کتیا را روی یک کامپیوتر داشته باشیم؟
نقشه کشی و نقشه خوانی مهندسی در نرم افزار کتیا
مدلسازی، مونتاژ و نقشه کشی در نرم افزار کتیا
آموزش دو بعدی سازی در نرم افزار کتیا
اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
مدلسازی قطعات در نرم افزار کتیا
مجموعه نقشه ها جهت تمرین و ترسیم با نرم افزارهای طراحی
آموزش بی نظیر نرم افزار کتیا
طراحی و مونتاژ گیربکس حلزونی در نرم افزار کتیا
مدلسازی، سطح سازی، شبیه سازی در نرم افزار کتیا
مدلسازی، مونتاژ و نقشه کشی در نرم افزار کتیا
طراحی و آنالیز چرخدنده مارپیچ در نرم افزار کتیا
طراحی و مدلسازی، آنالیز و ماشینکاری خودرو مسابقه ای در نرم افزار کتیا
کتاب مکانیک و کنترل در رباتیک (Mechanics and Control in Robotics)
در حال حاضر، بررسی ابعاد مختلف تحقیقات روباتیک توسط متخصصان زمینه های گوناگون انجام می پذیرد. معمولا نمی توان فردی را پیدا کرد که بر کل زمینه رباتیک مسلط باشد. از این رو این رشته به رشتههای فرعی تقسیم شده است. به طور مجرد میتوان رباتیک را به چهار رشته فرعی اعمال مکانیکی، انتقال و حرکت، بینایی کامپیوتر و هوش مصنوعی تقسیم کرد. در این کتاب رشته فرعی علم و مهندسی اعمال مکانیکی معرفی میشود. مبانی این رشته فرعی روباتیکی در چندین زمینه کلاسیک مختلف یافت میشود که اصلی ترین آنها مکانیک، نظریه کنترل و علوم کامپیوتر است.
طراحی و ساخت ربات مسیریاب هفت سنسور
مجموعه مقالات مهندسی رباتیک
ربات های هوشمند
مکانیک و کنترل در رباتیک
کتاب مکانیک و کنترل در رباتیک (Mechanics and Control in Robotics)، نوشته جان کریگ می باشد که توسط دکتر علی مقداری و مهندس فائزه میر فخرایی از دانشگاه صنعتی شریف ترجمه شده است. در این کتاب فصلهای ۱ تا ۸ عنوانهایی از مهندسی مکانیک و ریاضیات، فصلهای ۹ تا ۱۱ موضوعاتی در نظریه کنترل و فصلهای ۱۲ تا ۱۳ مطالبی در علوم کامپیوتری را در بر میگیرند. به علاوه، در این کتاب بر جنبههای محاسباتی مسائل تاکید شده است و در پایان فصلهایی که بیشتر درباره مکانیک بحث کرده اند، بخشی کوتاه ویژه مسائل محاسباتی در نظر گرفته شده است. این کتاب مشتمل بر 570 صفحه، در 13 فصل، به زبان فارسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
فصل اول: مقدمه
- زمینه
- مکانیک و کنترل بازوهای مکانیکی ماهر
- نمادگذاری
فصل دوم :توصیف ها و تبدیل های فضایی کلی
- مقدمه
- توصیف ها: مکان ها، جهت گیری ها و چهار چوب ها
- نگاشت ها: تغییر دادن توصیف ها از چهارچوبی به چهارچوب دیگر
- عملگرها: انتقال ها، دوران ها و تبدیل های کلی
- خلاصه تعبیرها
- عملیات ریاضی در تبدیل کلی
- معادله های تبدیل
- مطالبی دیگر درباره نمایش جهت گیری
- تبدیل بردارهای آزاد
- ملاحظات محاسباتی
فصل سوم: سینماتیک بازوهای مکانیکی ماهر
- مقدمه
- توصیف رابط
- توصیف اتصال رابط
- قرارداد برای اتصال چهارچوب ها به رابط ها
- سینماتیک بازوهای مکانیکی ماهر
- فضای کاراندازی، فضای مفصلی و فضای دکارتی
- مثال ها: سینماتیک دو روبات صنعتی
- چهارچوب های با نام های استاندارد
- ابزار کجاست؟
- ملاحظات محاسباتی
فصل چهارم: سینماتیک وارون بازوهای مکانیکی ماهر
- مقدمه
- حل پذیر بودن
- نمادگذاری زیر فضای بازوی مکانیکی ماهر در حالت 6 >n
- راه حل جبری در مقابل راه حل هندسی
- راه حل جبری از طریق تبدیل به چند جمله ای
- روش حل پایپر برای سه محور متقاطع در یک نقطه
- مثال هایی از سینماتیک وارون بازوهای مکانیکی ماهر
- چهارچوب های استاندارد
- استفاده از زیر برنامه SOLVE برای بازو های مکانیکی ماهر
- دقت و تکرارپذیری
- ملاحظات محاسباتی
فصل پنجم: ژاکوبی ها، سرعت ها و نیروهای استاتیکی
- مقدمه
- نمادگذاری برای مکان و جهت گیری متغیر با زبان
- سرعت خطی و دورانی اجسام صلب
- مطالبی بیشتر درباره سرعت زاویه ای
- حرکت رابط های روبات
- چگونگی اشاعه سرعت از رابطی به رابط دیگر
- ژاکوبی ها
- حالت های تکین
- نیروهای استاتیکی در بازوهای مکانیکی ماهر
- ژاکوبی ها در حوزه نیرو
- تبدیل دکارتی سرعت ها و نیروهای استاتیکی
فصل ششم: دینامیک بازوهای مکانیکی ماهر
- مقدمه
- شتاب جسم صلب
- توزیع جرم
- معادله نیوتن معادله اویلر
- محاسبات دینامیکی تکراری نیوتن اویلر
- معادله های تکراری و معادله های به شکل بسته
- مثالی از معادله های دینامیکی بسته
- ساختار معادله های دینامیکی بازوهای مکانیکی ماهر
- روش لاگرانژ در به دست آوردن معادله های دینامیکی بازوهای مکانیکی
- بدست آوردن معادله های دینامیکی بازوهای مکانیکی در فضای دکارتی
- شمول اثرات جسم غیر صلب
- شبیه سازی دینامیکی
- ملاحظات محاسباتی
فصل هفتم: تولید مسیر
- مقدمه
- ملاحظات کلی درباره توصیف و تولید مسیر
- روش های فضای مفصلی
- روش های فضای دکارتی
- مشکلات هندسی مسیرهای دکارتی
- تولید مسیر در هنگام اجرای برنامه کامپیوتری
- توصیف مسیر با زبان برنامه ریزی روبات
- طرح ریزی مسیر با استفاده از مدل دینامیکی
- طرح ریزی مسیرهای عاری از برخورد
فصل هشتم: مکانیزم بازوهای مکانیکی ماهر
- مقدمه
- طراحی بر پایه عملیات خواسته شده از روبات
- پیکربندی سینماتیکی
- معیارهای کمی مشخصات فضای کاری
- سازه های زنجیری زاید و بسته
- روش های کارانداز
- سختی و تغییر شکل خمشی
- حس مکان
- حس نیرو
فصل نهم: کنترل خطی بازوهای مکانیکی ماهر
- مقدمه
- کنترل مدار بسته و پس خوراند (فید بک)
- سیستم های خطی درجه دوم
- کنترل سیستم های درجه دوم
- تقسیم قانون کنترل
- کنترل تعقیب مسیر
- دفع اغتشاش
- کنترل زمانی پیوسته و ناپیوسته (منقطع)
- مدل سازی و کنترل یک مفصل تنها
- ساختمان کنترل کننده یک روبات صنعتی
فصل دهم: کنترل غیر خطی بازوهای مکانیکی ماهر
- مقدمه
- سیستم های غیر خطی و متغیر با زمان
- سیستم های کنترل چند ورودی چند خروجی
- کنترل بازوهای مکانیکی ماهر
- ملاحظات عملی
- سیستم های کنترل روبات های صنعتی امروزی
- تحلیل پایداری لیاپونوف
- سیستم های کنترل مبتنی بر مختصات دکارتی
- کنترل تطبیقی
فصل یازدهم: کنترل نیرو در بازوهای مکانیکی ماهر
- مقدمه
- کاربرد روبات های صنعتی در عملیات مونتاژ
- چهارچوب اعمال کنترل در عملیات مقید شده جزئی
- مسئله کنترل ترکیبی مکان نیرو
- کنترل نیروی سیستم جرم فنر
- روش های کنترل ترکیبی مکان نیرو
- روش های کنترل روبات های صنعتی کنونی
فصل دوازدهم: سیستم ها و زبان های برنامه ریزی روبات
- مقدمه
- سه شیوه برنامه ریزی روبات
- کاربردی نمونه
- شرایط لازم برای زبان برنامه ریزی روبات
- کاربردی نمونه به سه زبان برنامه ریزی روبات
- مسائل ویژه در زبان های برنامه ریزی روبات
فصل سیزدهم: برنامه ریزی خارج خط
- مقدمه
- مطالب اصلی در سیستم های OLP
- ایستگاه Cim
- اتوماسیون عملیات فرعی در سیستم های OLP
- خلاصه
لازم به ذکر است که علاوه بر کتاب فوق، راهنمای حل مسائل کتاب نیز جهت دانلود قرار داده شده است.
مکانیزم ها و دستگاه های مکانیکی
بررسی ربات میکروموس
کنترل روبات دو محوره با کنترل کننده ی فازی

اگر به فراگیری مباحث مشابه مطلب بالا علاقهمند هستید، آموزشهایی که در ادامه آمدهاند نیز به شما پیشنهاد میشوند:
طراحی بدنه، طراحی داخلی و آرشیتکتوری خودروی هیبریدی
بلوپرینت و نقشه های آماده جهت طراحی و مدلسازی سه بعدی خودرو
مبانی دینامیک خودرو
طراحی شاسی خودروی هیبریدی شهری کم مصرف
سنسورها و اهمیت کاربرد آن
مکاترونیک و رباتیک
کلید استخدام در دست های شماست!