برتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیکبرتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیکپروژه با عنوان: کنترل روبات دو محوره با کنترل کننده ی فازی
ربات ها که از تازه ترین دستاوردهای تکنولوژی نوین می باشند، عبارتند از دستگاه های ظریف، حساس و دقیقی که بسیار سریع تر از انسان و به صورت اتوماتیک کارهای محوله را انجام می دهند. از ویژگی های مهم ربات ها این است که قابلیت برنامه ریزی و کنترل از راه دور را دارند، لذا از آنها می توان در محیط هایی استفاده نمود که انسان قادر به انجام کار در آن نیست، مثل کار در محیط های غیر بهداشتی و سخت از قبیل رنگ زنی، قیر پاشی، دسته بندی و جابجایی مواد سمی، مواد رادیو اکتیو، کار در محیط گرم و یا سرد که انسان قادر به تحمل دمای آنها نمی باشد، کار در محیط هایی که اکسیژن نداشته و یا هوای آنها خوب نمی باشد و یا اینکه از آنها در کارهایی استفاده نمود که انسان قادر به درک، حل و انجام آنها در سریع ترین زمان نیست. استفاده از ربات ها در صنایع امروز بهبود عملکرد سیستم های دینامیکی، بهبود کیفیت و نزول قیمت محصول، ازدیاد درصد تولید و سهولت بیشتر کنترل شده است. ربات ها با توجه با طراحی ساخت آنها دارای قابلیت هایی می باشند که مشکل ماشین های اتوماتیک را در صنایع برطرف نموده اند، بدین صورت که با استفاده ار آنها می توان محصولات متنوعی را در خطوط تولید مختلف با کیفیت و دقت بالا تولید نمود و دیگر مثل قدیم با تعویض مثلاً یک خط تولید نیاز به تعویض ماشین آلات اتوماتیک آنها نمی باشد. استفاده از ربات ها در جابجایی اشیاء، دسته بندی آنها، انواع جوش های صنعتی، قیر پاشی، مونتاژ دستگاه ها، حمل بار، برش فلزات، چسباندن مواد، انجام تست های حساس، انتقال و کار با مواد رادیو اکتیو، انجام تست ها و آزمایش های پزشکی، جراحی های دقیق بر روی اعضای بدن و غیره متداول می باشد. همچنین با توجه به پیشرفت های اخیر تکنولوژی در امر استفاده از ربات و همچنین نیاز انسان ها به ربات هایی با سرعت بالا و کیفیت عالی، ایده استفاده از ربات های سبک مطرح شده است، از آنجائی که در ربات های سبک با سرعت های بالا و بارهای سنگین، تغییر فرم نسبی در بازوهای ربات رخ می دهد، بدین سبب مسئله ربات با بازوهای الاستیک مطرح می گردد. ربات های الاستیک نسبت به ربات های صلب دارای قابلیت اعتماد بیشتر، اندازه و حجم کوچکتر، کارایی و سودمندی بیشتر، هزینه های تولیدی کمتر، کیفیت تولید بیشتر، سطح تولید بالاتر، قابلیت تغییر پذیری بیشتر، برنامه ریزی کنترلی ساده تر، قابلیت تکرار و دقت بالاتر، تحرک و سرعت عمل بیشتر و ظرفیت حمل بار و سرعت بالاتر می باشند، لذا مشاهده می شود که این نوع ربات ها جهت تولیدات صنعتی بسیار مناسب تر هستند. بازوهای ربات های الاستیک در سرعت های زیاد و بارهای سنگین به گشتاورهای پیچشی کمتری نیاز دارند، لیکن در این حالت تغییر فرم های نسبی ناشی از خمش، پیچش و کشش به وجود می آید و این موضوع باعث ایجاد کاهش دقت کارکرد و همچنین ناپایداری سیستم می شود. پس نیاز به یک مدل کامل دینامیکی برای این نوع ربات ها می باشد که با استفاده از آن بتوان بازوهای سبک را تحت سرعت های بالا و بارهای سنگین به خوبی کنترل نیز نمود. این مدل می بایستی نه تنها سیستماتیک حرکت بازوها، بلکه مسائل دینامیکی از قبیل نیروها و گشتاورهای پیچشی مورد نیاز برای این حرکات را هم ارائه دهد.

مهندسین و طراحان ربات ها همواره خواهان دقت بیشتر، سرعت بالاتر و قیمت کمتر ربات های جدید هستند، چنانچه بتوان تحلیل مشخصی از رفتار ربات های ارتجاعی بدست آورد، می توان ربات هایی ساخت که مزایای بیشتری نسبت به قبل (طراحی صلب) داشته باشند. در همین راستا، در این پروژه سعی بر آن است که ضمن بررسی روش های موجود، ابتداء معادلات حرکت یک ربات یک لینکه ارتجاعی در صفحه بدست آید. کاربردهای فضایی، زیر دریایی ها، دفع زباله های بیمارستانی و کار در محیط هایی با آلودگی هسته ای از کاربردهای جدید این روبات ها است. مساُله روبات های الاستیک از آنجا مطرح شد که در روبات های سبک با سرعت های بالا و بارهای سنگین، تغییر فرم نسبی در بازوهای روبات رخ می دهد. این گونه روبات ها که اثر تغییر فرم نسبی بازوها در آن در نظر گرفته می شود، به روبات الاستیک معروف اند. روش بدست آوردن مدل دینامیکی که در اینجا برای تحلیل جابجائی های ناشی از تغییر فرم نسبی استفاده می کنیم، روش لاگرانژ است. اما از نقطه نظر کنترل این ربات ها به خاطر دینامیک پیچیده، مدهای ناپایدار در بازوها و مفاصل، احتیاج به روش های کنترل خاص دارند. از زمان مطرح شدن این ربات ها به عنوان یک سیستم تحت کنترل روش های متنوع اعم از کلاسیک، هوشمند و ترکیبی برای کنترل آنها پیشنهاد و تست شده است، که روش های کلاسیک کنترل، دامنه بیشتری را به خود اختصاص داده اند. از کنترل PID ساده شروع شده تا کنترلرهای غیر خطی مد لغزشی ادامه داده شده است. روش های هوشمند نیز اعم از کنترلرهای فازی و کنترلرهای عصبی و کنترلرهای عصبی فازی به صورت متنوع به کار برده شده اند. اما در اکثر کارهای انجام شده این دو روش، یعنی کنترلر کلاسیک و کنترلر هوشمند به طور جداگانه از هم طراحی شده اند و کمتر به صورت ترکیبی مورد استفاده قرار گرفته اند. هدف این پروژه بررسی مختصر روش های کنترل انجام شده تا کنون است، ضمنأ در این پروژه یکی از روش های شبیه سازی شده نیز به طور کامل مورد بررسی قرار می گیرد. به طور خلاصه هدف این شبیه سازی ها و بررسی ها این است که در نهایت به روش کنترل با کارایی و دقت بالا برای این گونه ربات ها دست یابیم. این پروژه در چهار فصل سازماندهی شده است. در فصل یک روش های مدل سازی دینامیکی روبات را شرح می دهیم. در فصل دو مدلسازی چند روبات نمونه آورده شده است. در فصل سه به بررسی روش های کنترل می پردازیم و در فصل چهار طراحی یک کنترل کننده ی فازی برای ربات را مشاهده می نماییم...

پروژه کنترل روبات دو محوره با کنترل کننده ی فازی، مشتمل بر چهار (4) فصل، 83 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf به ترتیب زیر گردآوری شده است:
فصل 1: روش های مدل سازی دینامیکی
- انواع روش های مدل سازی
- معادلات پایه ی دینامیک
- معادلات دینامیکی شکل بسته
- تعبیر فیزیکی معادلات دینامیکی
- فرمول بندی لاگرانژی دینامیک بازوی عملگر مکانیکی
- دینامیک لاگرانژی
- تانسور اینرسی بازوی عملگر مکانیکی
- استخراج معادلات حرکت لاگرانژی
فصل 2: مدل سازی چند ربات نمونه
- معادلات دینامیکی روبات تک لینکی
- معادلات دینامیکی روبات دو لینکی
- معادلات دینامیکی روبات سه لینکی
- معادلات دینامیکی روبات های الاستیک
- روبات با لینک انعطاف پذیر
- روبات با مفصل الاستیک
- مدل سازی روبات با بازوی انعطاف پذیر
فصل 3: روش های کنترل
- فیدبک حالت
- فیدبک حالت در سیستم های یک ورودی و یک خروجی
- سیستم های فازی و کنترل فازی
- سیستم فازی وکاربرد آن
- تاریخچه مختصری از تئوری و کنترل فازی
- کنترل فازی در مقایسه با کنترل کلاسیک
- روش طراحی کنترل کننده های فازی
- کنترل فازی سیستم های خطی
- کنترل فازی سیستم های غیرخطی
- دسته بندی کلی کنترل فازی
- انواع کنترل فازی تطبیقی
- کنترل کننده PID فازی
- کنترل ترکیبی FEL
- آشنایی با ایده FEL
- شمای کلی روش FEL
فصل 4: طراحی کنترل کننده فازی برای روبات با بازوی انعطاف پذیر
- طراحی کنترل کننده فازی برای روبات با بازوی انعطاف پذیر
- بررسی معادلات دینامیکی از نقطه نظر کنترلی
- مکان هندسی ریشه ها
- طراحی کنترل کننده
- طراحی کنترل کننده ی فازی برای روبات دو لینک
- معادلات دینامیکی روبات دو لینکی صلب
- طراحی کنترل کننده برای روبات دو لینکی صلب

جهت دانلود پروژه کنترل روبات دو محوره با کنترل کننده ی فازی برلینک زیر کلیک نمایید:
پروژه با عنوان: کنترل روبات دو محوره با کنترل کننده ی فازی
پروژه با عنوان: دور کننده الکترونیکی حشرات و جانوران
هدف از این پروژه، ساخت یک دستگاه دور کننده حشرات، پرندگان و جوندگان موذی از راهیابی آنها به محل هایی از قبیل پست های فشار قوی، مزارع، انبارها، تاسیسات صنعتی، رستوران ها، ایستگاه های حمل و نقل جلو گیری به عمل آید. با انتشار امواج مافوق صوت این کار عملی خواهد شد و از سموم شیمیایی که باعث آلودگی بیشتر محیط زیست می گردد کاسته می شود. محدوده فرکانس شنوایی انسان بین ۲۰ تا ۲۰۰۰۰ هرتز است، فرکانس های بیش از این بازه را مافوق صوت و کمتر از این بازه را فرو صوت می گویند. محدوده شنوایی حشرات و پرندگان معمولا در محدوده مافوق صوت است. با تولید صداهای مافوق صوت این موجودات دچار سر درد می شوند و محل را ترک می نمایند ولی چون برای انسان قابل شنیدن نیست هیچ مزاحمتی برای انسان بوجود نمی آورند...

پروژه دور کننده الکترونیکی حشرات و جانوران، مشتمل بر شش (6) فصل، 56 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
چکیده
فصل 1: مقدمه
فصل 2: سیستم شنوایی
- گوش
- گوش خارجی
- گوش میانی
- گوش داخلی
- مکانیسم شنوایی
- کیفیت صوت
- محدوده های شنوایی موجودات مختلف
فصل 3: آشنایی با دستگاه
- دلایل ساخت دستگاههای دور کننده
- آشنایی با کارکرد دستگاه دور کننده حشرات
- ویژگی ها
- مکان های مورد استفاده دستگاه
فصل 4: سخت افزار
- قطعات مدار
- توضیح مدار
- تصاویری از پروژه ساخته شده
فصل 5: آشنایی با دستگاه های مشابه
- دستگاه التراسونیک
- دستگاه چطور کار می کند؟
- چه حیوانات و پرندگانی را دور می کند؟
- در چه محل هایی می توان از آن استفاده کرد؟
- مشخصات دستگاه
- دستگاه جیبی فراری دهنده پشه مدل UAW
- دستگاه فراری دهنده پرنده سونیک PIR
فصل 6: نتیجه گیری و پشنهادات
مراجع
جهت دانلود پروژه دور کننده الکترونیکی حشرات و جانوران برلینک زیر کلیک نمایید:
پروژه با عنوان: دور کننده الکترونیکی حشرات و جانوران
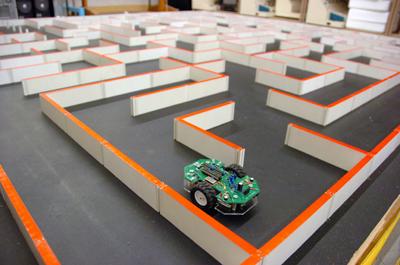
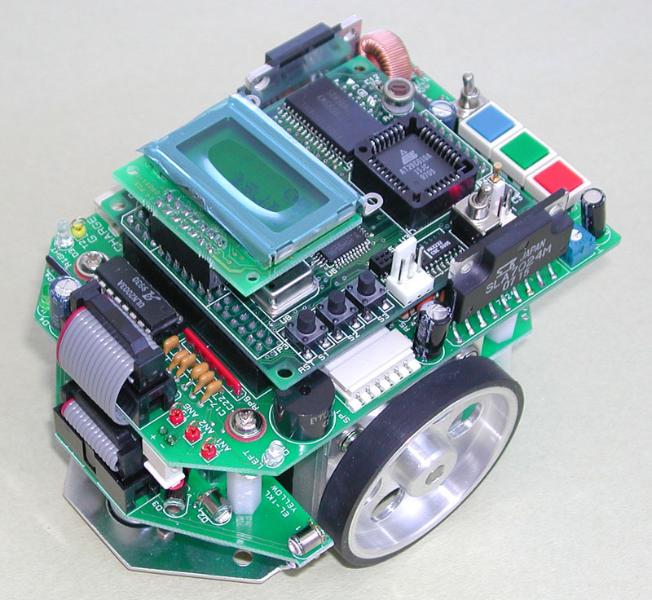
پروژه با عنوان: بررسی ربات میکروموس (MicroMouse Robot)
این پروژه تحت عنوان ربات میکروموس، در سه فصل تهیه شده است. فصل اول مستندات این پروژه به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده است. در فصل سوم، ساختن ربات میکروموس، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات میکروموس به طور کامل قرار داده شده است. ربات میکروموس، رباتی است که می تواند در یک مسیر بسته حرکت کرده و مسیر درست را پیدا نماید. این مسیر می تواند یک خط سیاه در زمینه سفید یا به صورت دیوار باشد. ربات باید بتواند مسیر درست را از مسیر غلط در کمترین زمان تشخیص بدهد...
پروژه بررسی ربات میکروموس (MicroMouse Robot)، مشتمل بر سه (3) فصل، 44 صفحه، تایپ شده، به همراه تصاویر، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
- ربات چیست؟
- تاریخچه ی پیدایش ربات
- تعاریف ربات
- علم رباتیک
- مزایا و معایب ربات ها
- قوانین سه گانه ی رباتیک
- دسته بندی ربات ها
- دسته بندی اتحادیه ربات های ژاپنی
- دسته بندی مؤسسه رباتیک آمریکا
- دسته بندی اتحادیه فرانسوی ربات های صنعتی
- انواع ربات ها
- ربات های متحرک
- طبقه بندی ربات ها
- ربات های نظامی
- کاربرد ربات ها
- ربات تعقیب خط
- ربات های حس کننده تماس
- اجزاء اصلی یک ربات
- معرفی قطعات به کار برده شده در ربات میکرو موس
- میکرو کنترلر
- چرخ هرزگرد
- برنامه ی ربات که به زبان بیسیک نوشته شده
- تاریخچه ی مسابقات میکرو موس
- آیین نامه اجرایی لیگ میکروموس
- الگوریتم های ربات میکرو موس
- الگوریتم pledge
- الگوریتم جستجوی تصادفی
- الگوریتم Bellman Flooding الگوریتم Tremaux
- چگونگی عملکرد الگوریتم بلدمن
- نمایی از یک نمونه ماز مسابقات میکروموس
جهت دانلود پروژه بررسی ربات میکروموس (MicroMouse Robot) برلینک زیر کلیک نمایید:
پروژه با عنوان: بررسی ربات میکروموس (MicroMouse Robot)
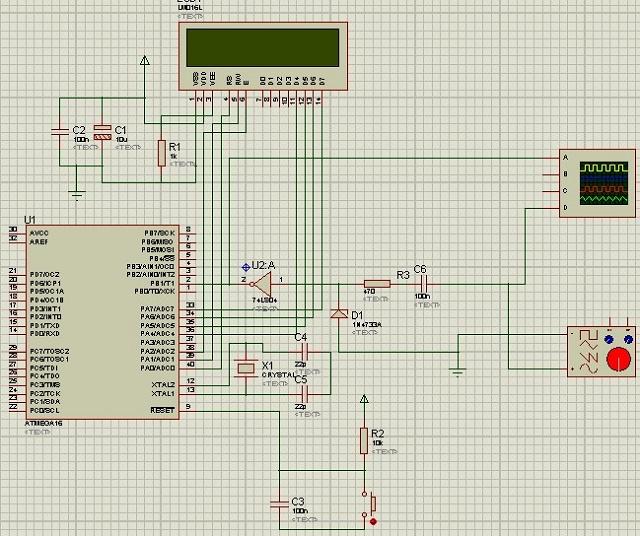
پروژه طراحی فرکانس متر دیجیتال (Digital Frequency Meter Design)
امروزه کار با میکروکنترلرها بیش از پیش ضرورت یافته و به موازات آن طراحی آنها نیز وارد مرحله جدیدی شده است که امکان انعطاف پذیری بیشتری را فراهم می نماید. یکی از این میکروکنترلرها، میکروکنترل ایویآر (AVR) است که سهم عمده ای از مصرف را به خود اختصاص داده است. از موارد پر کاربرد میکروکنترلرها، میتوان انجام محاسبات، اندازهگیری کمیت ها و تبدیل مقادیر آنالوگ به دیجیتال را نام برد که در بیشتر دستگاه ها و تجهیزات الکترونیکی امروزه استفاده میشود. در اینجا نیز اگر پالس های اعمالی به کانتر میکرو کنترلر را در یک ثانیه شمارش کنیم، پالس شمارش شده بر حسب هرتز همان فرکانس پالس مورد نظر است. پس از اندازه گیری تعداد پالس ها، مقدار فرکانس سیگنال ورودی را بر روی نمایشگر ال سی دی نمایش می دهیم. برای جمعآوری این تحقیق، از کتابها و پروژه های دانشگاهی متعددی در زمینه، ایویآر و برنامهنویسی سی مطالعه شده است و همچنین پروژههای متنوعی که از امکان مبدل دیجیتال به آنالوگ ایویآر استفاده میکنند، مورد بررسی قرار گرفته است...

پروژه مورد نظر مشتمل بر چهار (4) فصل، 67 صفحه، تایپ شده، به همراه تصاویر، با فرمت word جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
فصل 1: مقاومت
- کمیت مقاومت الکتریکی
- عنصر مقاومت الکتریکی
- انواع مقاومت های الکتریکی
- مقاومت های ثابت
- مقاومت های کربنی (ترکیبی)
- مقاومت های سیمی
- مقاومت های لایه ای
- مقاومت های متغیر
- مقاومت های قابل تنظیم
- پتانسیومتر
- رئوستا
- مقاومت های وابسته
- مقاومت های تایع حرارت
- مقاومت های تابع نور
- مقاومت های تابع ولتاژ
- مقاومت های تابع میدان مغناطیسی
فصل 2: میکروکنترلر
- آشنایی با ای وی آر (AVR)
- امکانات کلی یک ای وی آر
- پروگرام کردن ای وی آر
- فیوزبیت
- منابع کلاک
- اسیلاتور آرسی کالیبره شده ی داخلی
- مبدل آنالوگ به دیجیتال
- رجیسترهای واحد ای دی سی
- نحوه اتصال ال سی دی به میکروکنترلر
فصل 3: برنامه نویسی
- محیط برنامه نویسی کدویژن
- کدویزارد
- زبان برنامه نویسی سی، دستورات و توابع
- انواع داده ها (متغیرها)
- آرایه ها
- رشته ها
- رهنمودهای پیش پردازنده
- اینکلاد
- دیفاین
- توابع کتابخانه ای
- تابع ال سی دی کلیر
- تابع ال سی دی گوتو
- تابع ال سی دی پوتس اف
- اس تی دیو.اچ
- اس تی دی ال آی بی.اچ
- دیلی.اچ
- پوتس
- دستورات کنترلی
- حلقه های کنترلی فور
- دستور کانتی نیو بریک
- حلقه های کنترلی وایل
- حلقه دو وایل
- دستور کنترلی سوییچ کیس
- دستور شرطی ایف
فصل 4: فرکانس متر
- فرکانس متر چیست
- کاربردهای فرکانس متر
- طراحی فرکانس متر متر دیجیتال
- منبع تغذیه
- ساختار طراحی فرکانس متر
- برنامه نویسی تراشه ای وی آر
- برنامه نویسی تراشه ای وی آر
- جمع بندی
- منابع و مراجع
جهت دانلود پروژه طراحی فرکانس متر دیجیتال (Digital Frequency Meter Design) برلینک زیر کلیک نمایید:
طراحی فرکانس متر دیجیتال (Digital Frequency Meter Design)
پروژه کاربرد روش های اکتشافی مبتنی بر تحلیل بافت در گروه بندی کیفی محصولات فولادی
استخراج ویژگی های بافت و تشخیص خرابی بافت یکی از مفاهیم اصلی در پردازش تصویر و بینائی ماشین می باشد. هدف این پایان نامه آنالیز و کلاس بندی بافت های طبیعی و تصادفی تصاویر سطوح ورق های فولاد می باشد. پس از بررسی الگوریتم های آماری مختلف تحلیل بافت، یک روش جدید برای ترکیب ویژگی های بافت و رنگ معرفی می گردد. ما ویژگی های بافتی تصویر را با استفاده از یک روش جدید مبتنی بر الگوریتم LBP بدست می آوریم. یک فضای رنگی جدید معرفی خواهیم کرد و از این فضای رنگی برای بدست آوردن ویژگی های رنگی استفاده خواهیم کرد و درپایان یک روش جدید اولیه/ثانویه برای ترکیب ویژگی های بافتی و رنگی ارائه می گردد. برای کلاس بندی نیز از شبکه های عصبی مصنوعی استفاده می کنیم و در انتها فواید روش جدید را درمقایسه با روشهای معمول تحلیل بافت مورد بررسی قرار خواهیم داد.
پروژه مورد نظر مشتمل بر پنج (5) فصل، 102 صفحه، تایپ شده، به همراه تصاویر، جداول، نمودار، با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد:

فصل اول: بافت،تعریف و کاربرد آن
- مقدمه
- نکاتی درمورد بازرسی خرابی سطوح
- تعریف بافت
- تکنیک های موجود برای تشخیص خرابی
- تکنیک های تصویری مبتنی برمحتوی
- کاربردهای تحلیل بافت
- بازرسی
- طبقه بندی مدل های بافت
- نتیجه گیری
فصل دوم: بررسی الگوریتمهای تحلیل بافت وکلاسبندی
- مقدمه
- ارتقای تصویر
- روش های میدان مکان
- دستکاری سطوح خاکستری
- پردازش هیستوگرام
- هموارسازی تصویر
- تیز کردن تصویر
- روش های میدان فرکانس
- فیلتر کردن
- بخشبندی تصویر
- آستانهگیری
- بخشبندی مبتنی بر لبه
- بخش بندی ناحیه گرا
- رشد ناحیه با پیوستن پیکسل ها
- تقسیم و ادغام ناحیه
- روال انجام مراحل استخراج ویژگی و تشخیص الگو
- روش های آماری تحلیل بافت
- ماتریس های هم رخداد(GLCM)
- تابع اتوکرلیشن (AC)
- معیار کواریانس متقارن نسبت به مرکز
- استخراج ویژگی
- ویژگی های دامنهای
- دسته بندی الگو
- دستهبندی کننده حداقل فاصله
- شبکههای عصبی
- نتیجه گیری
فصل سوم: آنالیز بافت با الگوهای دودوئی محلی(LBP)
- مقدمه
- عملگر LBP
- یک روش یکنواخت برای آنالیز بافت
- LBP و توسعه های آن
- سرچشمه LBP
- تغییر ناپذیری با چرخش
- LBP با چند رزولوشن
- LBP رنگ های متضاد
- خلاصه
فصل چهارم: آزمایشات کلاسبندی
- مقدمه
- مجموعه داده
- ساختار شبکه عصبی
- نتایج کلاس بندی
- ماتریس های همرخداد
- الگوریتم LBP
- الگوریتم LBPROOT
- الگوریتم LBP یکنواخت
- الگوریتم LBPU با چندین رزولوشن
- الگوریتم LBP/var
- الگوریتم LBP با رنگهای متضاد
- نتیجه گیری
فصل پنجم: معرفی روشی جدید برای کلاسبندی
- مقدمه
- پیش پردازش تصاویر
- الگوریتم جدید مبتنی بر LBP
- فضای رنگی جدید
- آزمایشات
- روشی جدید برای ترکیب ویژگیهای رنگی و بافتی
- نتیجه گیری
جهت دانلود پروژه کاربرد روش های اکتشافی مبتنی بر تحلیل بافت در گروه بندی کیفی محصولات فولادی بر لینک زیر کلیک نمایید:
کاربرد روش های اکتشافی مبتنی بر تحلیل بافت در گروه بندی کیفی محصولات فولادی