برتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیکبرتر فایل
مجموعه فایل های آموزش مقدماتی تا پیشرفته نرم افزار کتیا (CATIA) و مجموعه کتب, جزوات, پروژه و مقالات تخصصی مهندسی مکانیکپروژه طراحی و ساخت تاکومتر (دستگاه اندازه گیر دور موتور)
تاکومتر وسیله ای است که تعداد چرخش (دوران) یک قطعه را در یک بازه ی زمانی مشخص اندازه گیری می نماید. معمولا این وسیله بر روی دستگاه هایی قرار می گیرد که بخواهند تعداد دور چرخش میل لنگ در موتور را اندازه بگیرند. این واژه از دو واژه ی یونانی می آید: تاکو به معنای سرعت و متر به معنای اندازه. تاکومترها معمولا در ماشین های اسپرت، هواپیماها، جرثقیل های بزرگ و کشتی ها برای اندازه گیری سرعت موتور به کار می رود.
انواع تاکومترها:
* تاکومتر الکتریکی: تاکومتر الکتریکی برای اندازه گیری امواج سینوسی، فرکانس و یا پالس های ورودی طراحی شده است. امواج ورودی توسط تشخیص دهنده هایی برش و شکل داده می شوند و بعد از آن از یک مدار گلوئی (دروازه) برای نمایش اعداد عبور داده می شود. زمان باز شدن این مدار گلوئی (دروازه) توسط یک نوسانگر کریستال کنترل می شود. نمایش دهنده ی شمارنده، تعداد پالس هایی را که در زمانی مشخص از این دروازه عبور می کنند اندازه می گیرد.
* تاکومتر الکتریکی، ژنراتوری: نمونه ی گسترده تر و منطف تری از تاکومترهای الکتریکی شامل ترکیبی از مولدهای برق و نشانگرها می باشد. دو فرم اصلی برای این نمونه وجود دارد: یک ژنراتور DC همراه با یک ولت متر DC و یک ژنراتور AC به همراه یک ولت متر AC (ولت متر DC به همراه یک همسان کننده). در هر دو مورد، ولت متر DC متناسب با سرعت محور کار می کند.
* تاکومتر جریان مستقیم (DC): تاکومتر جریان مستقیم، یک ژنراتور مغناطیسی پایدار کوچک با خروجی ۲ تا ۱۰ ولت در هر دقیقه است. یک ولت متر با مقاومت بالا که در هر دور در دقیقه، کالیبره می شود، نشان دهنده ی سرعت در این نوع تاکومتر می باشد. آغاز به کار آرام گشتاورهای این تاکومتر و فعالیت آن با همین سرعت کم، این تاکومتر را برای اندازه گیری سرعت باید نیز مناسب کرده است. در کنار اندازه گیری سرعت، این تاکومتر به عنوان یک جز با ثبات مکانیزم (سیستم) سرعت می باشد.
* تاکومتر جریان متناوب (AC): این تاکومتر می تواند توسط سیم پیچی های ثابت و یک فیلد آهن ربایی گردان تشکیل شود. آنها ولتاژ ها و فرکانس هایی را متناسب با سرعت تولید می کنند.
* تاکومتر جریان مخالف: تاکومتر جریان مخالف، به عنوان یک تاکومتر کشیدنی نیز شناخته شده است. این وسیله معمولا برای اندازه گیری سرعت موتور اتومبیل ها و اندازه گیری سرعت موتور هواپیما استفاده می شود. جریان های مغناطیسی تولید شده توسط این جریان های مخالف، به تولید میدان مغناطیسی در این تاکومتر می پردازد.

این پروژه مربوط به طراحی تاکومتر دیجیتال بر مبنای سنسور مادون قرمز می باشد. در این وسیله نیازی به لمس موتور توسط دستگاه نمی باشد و در اصطلاح به آن تاکومتر بدون لمس می گویند. این وسیله دور موتور را با واحدهای RPM (دور بر دقیقه) و RPS (دور بر ثانیه) اندازه گیری می نماید. تاکومتر ساخته شده بر مبنای بازتاب نور کارکرده و با فرستادن اطلاعات به میکروکنترلر و بازخوانی آن توسط نمایشگر، دور اندازه گیری شده نمایش داده می شود. طراحی مدار توسط نرم افزار Proteus طراحی شده و برنامه توسط نرم افزار Bascom نوشته شده است.
پروژه مورد نظر مشتمل بر 30 صفحه، تایپ شده، به همراه تصاویر رنگی با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
* مقدمه
* اجزا مورد استفاده در مدار
* مقاومت، خازن و دیود
* میکروکنترلر AVR
* بررسی سری ATMEGA8
* سنسور گیرنده و فرستنده مادون قرمز (IR)
* LCD کاراکتری و شرح پایه های LCD کاراکتری
* PCB (فیبر مدار چاپی)
* تقویت کننده عملیاتی (Op Amp)
* استفاده از تقویت کننده عملیاتی به عنوان مقایسه گر
* رگولاتور ولتاژ (۷۸۰)
* رگولاتور ولتاژ (LM 7)
* نحوه ساخت و مراحل کار
* طراحی مدار تغذیه
* مدار پیکره بندی LCD
* مدار اصلی تاکومتر
* نقشه PCB مدار
* نحوه ساخت مدار
* برنامه میکروکنترلر
* توضیحات مربوط به برنامه
* نتایج
* فهرست مراجع

جهت دانلود پروژه طراحی و ساخت تاکومتر (دستگاه اندازه گیر دور موتور) بر لینک زیر کلیک نمایید:
پروژه طراحی و ساخت تاکومتر (دستگاه اندازه گیر دور موتور)
پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور)
اتوماسیون در بخش های مختلف صنعت و کارهای تولیدی در چند دهه اخیر ظهور پیدا کرده است و روز به روز نیز در حال توسعه می باشد. بیش از چند دهه از ظهور کارخانجات کاملاً مکانیزه که در آن ها تمامی پروسه ها اتوماتیک بوده و نیروی انسانی در آن نقش اجرائی ندارد، نمی گذرد. اما در چند سال اخیر شاهد بوجود آمدن کارخانجات مکانیزه ای بوده ایم که طراحی، ساخت و نحوه کار آن ها واقعاً حیرت انگیز است. ایده و دانش کنترل اتوماتیک و استفاده از سیستم های مکانیزه در کارخانجات به جنگ جهانی دوم می رسد. اما تحولات عظیم و چشم گیر آن در سال های اخیر به وقوع پیوسته است. رُبات یا روبوت وسیلهای مکانیکی جهت انجام وظایف مختلف است. یک ماشین که میتواند برای عمل به دستورات مختلف برنامه ریزی گردد و یا یک سری اعمال ویژه انجام دهد. مخصوصا آن دسته از کارها که فراتر از حد تواناییهای طبیعی بشر باشند. این ماشین های مکانیکی برای بهتر به انجام رساندن اعمالی از قبیل احساس کردن، درک نمودن و جابجایی اشیا یا اعمال تکراری شبیه جوشکاری تولید میشوند.

ربات مسیریاب رباتی است که می تواند در یک مسیر از قبل تعیین شده حرکت کند، این مسیر می تواند یک خط سیاه در زمینه سفید یا یک خط سفید در زمینه سیاه باشد. یا مخلوتی از هر دو باشد. ربات باید بتواند انواع مسیرهای موجود مانند پیچ، بریدگی، خطوط زاویه دار و مهم تر از همه حلقه را در کمترین زمان ممکن طی کند.
پایان نامه مورد نظر مشتمل بر 3 فصل، 73 صفحه، تایپ شده، به همراه تصاویر رنگی با فرمت word جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید و فصل بندی پروژه به ترتیب زیر می باشد: فصل اول به بررسی تعاریف خاصی که در زمینه رباتیک وجود دارد و همچنین موضوعات مرتبط با آن مانند تاریخچه رباتیک، انواع ربات ها، دسته بندی ربات ها پرداخته شده است. در فصل دوم کاربرد ربات ها و همچنین اجزاء ربات ها را مورد بررسی قرار داده شده و در فصل سوم، ساختن ربات مسیر یاب، شرح عملکرد ربات، توضیحات مدار و برنامه ربات و همچنین تصاویری از قطعات این ربات و تصویر ربات مسیر یاب به طور کامل قرار داده شده است...
مقدمه
فصل اول (ربات ها، تاریخچه و انواع آن ها):
- ربات
- تعاریف ربات
- علم رباتیک
- مزایای ربات ها
- معایب ربات ها
- تاریخچه ربات ها
- دسته بندی ربات ها
- دسته بندی اتحادیه ربات های ژاپن
- دسته بندی موسسه رباتیک آمریکا
- دسته بندی اتحادیه فرانسوی ربات های صنعتی
- انواع ربات ها
- ربات های متحرک
- ربات همکار
- نانوبات
- طبقه بندی ربات ها
- طبقه بندی ربات ها از نظر کاربرد
- ربات های صنعتی
- ربات های شخصی و علمی
- ربات های نظامی
- طبقه بندی ربات ها از نظر استراتژی کنترل
- نسل اول
- نسل دوم
- نسل سوم
- نسل چهارم
- طبقه بندی ربات ها از نظر محرک مفصل ها
- سیستم های الکتریکی
- موتورهای DC
- موتورهای AC
فصل دوم (کاربرد رباتها و اجزاء آنها)
- کاربرد ربات ها
- ربات آدم نمای اعلام خطر
- ربات ها برای تقلید رفتار حیوانات
- ربات تعقیب خط
- ربات حس کننده تماس
- ربات آبی، برای یافتن جعبه سیاه هواپیما
- ربات پذیرش
- اجزاء اصلی یک ربات
- بازوی مکانیکی ماهر
- سنسورها
- سنسورهای بدون تماس
- سنسورهای القائی
- کنترلر
- واحد تبدیل توان
- موتور
- دسته بندی کلی موتورها
- محرک مفاصل
فصل سوم (ربات مسیریاب)
- ربات مسیریاب
- ربات مسیر یاب 7 سنسور
- شرح عملکرد ربات مسیر یاب
- ساختن ربات مسیر یاب
- مدار ربات مسیر یاب
- برنامه ربات مسیر یاب
- شکل ربات مسیر یاب 7 سنسور
منابع و ماخذ
پروژه طراحی و ساخت ربات مسیریاب (هفت سنسور)
تحقیق با عنوان: ربات های هوشمند (Intelligence Robot Project)
- به صورت خودکار کنترل شود
- قابل برنامه ریزی مجدد باشد
- چند منظوره باشد
- با داشتن چندین درجه آزادی قدرت جابجائی داشته باشد
- روبات می تواند متحرک و یا ثابت باشد.
امروزه روبات ها در انجام بسیاری از کارها به کمک انسان آمده و در برخی کارها نیز جایگزین آدمی گشته اند از جمله: کار در کارخانه، اکتشافات فضائی، جراحی و... به طور کلی روبات ها در کارهائی استفاده می شوند که خطرناک بوده (مثل نیروگاه های هسته ای)، مشکل و تکراری باشند (مثل اغلب کار کارخانه ها) و محیط های کثیف (مثل داخل لوله ها)...

تحقیق ربات های هوشمند (Intelligence Robot Project)، مشتمل بر 63 اسلاید، تایپ شده، به همراه تصاویر رنگی، مناسب برای کنفرانس های کلاسی دانش آموزی و دانشجویی رباتیک، توسط مهندس شرافت نیا از دانشگاه فردوسی مشهد، با فرمت Powerpoint جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید.
جهت دانلود تحقیق ربات های هوشمند (Intelligence Robot Project) برلینک زیر کلیک نمایید:تحقیق با عنوان: ربات های هوشمند (Intelligence Robot Project)
کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)
کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)، یک کتاب مفید و کاربردی از مهندسی رباتیک است که مشتمل بر 162 صفحه، 16 مقاله بین المللی به ثبت رسیده، به زبان فارسی، تایپ شده، به همراه تصاویر رنگی، نمودارها، روابط ریاضی و... با فرمت PDF، مفید برای دانشجویان رشته های مهندسی رباتیک، مکانیک، برق و الکترونیک، کامپیوتر و... که به ترتیب زیر گردآوری شده است:
- مقاله 1: برنامه ریزی و شبیه سازی جوشکاری رباتیک اتصالات روی هم افقی ورق ها در GMAW
- مقاله 2: آموزش سیستم بینایی ربات فوتبالیست با استفاده از شبکه های عصبی
- مقاله 3: استفاده از تصاویر استریو برای ناوبری ربات سیار
- مقاله 4: تحلیل دینامیکی و طراحی حرکتی یک ربات خزنده بر روی سطح شیبدار
- مقاله 5: تحلیل دینامیکی یک روبات ماشین کار به روش NOC
- مقاله 6: کنترل تطبیقی ربات به همراه اصطکاک در اتصالات
- مقاله 7: کنترل کننده ناظر تطبیقی در سیستم های رباتیک مشتمل بر چند بازو
- مقاله 8: طراحی گریپر جهت نصب رباتیک شیشه خودرو
- مقاله 9: کنترل هوشمند موقعیت ربات در جابجایی اجسام
- مقاله 10: ربات هوشمند حل کننده پازل عددی با قابلیت تعریف ماموریت های جدید
- مقاله 11: ربات تعقیب کننده مسیر به همراه موقعیت یاب محلی
- مقاله 12: مدل سازی سینماتیکی و بررسی عملکرد ربات متحرک سه چرخه
- مقاله 13: طراحی، شبیه سازی و ساخت ربات آدم نمای آریا
- مقاله 14: تقویت کننده های عملیاتی و مقایسه کننده ها
- مقاله 15: ربات تعقیب خط بدون استفاده از میکرو کنترلرها
- مقاله 16: طراحی بدنه و شاسی ربات جنگنده

کتاب مجموعه مقالات مهندسی رباتیک (Robotic Engineering)
پروژه تکنولوژی تولید و ساخت لوح فشرده
تاریخچه ساخت لوح های فشرده زیاد طولانی نمیباشد. لوح های فشرده ابتدا در سال 1980 مطرح شدند و ایده ی ساخت آنها ظاهرا از صفحات گرامافون گرفته شده است. لوح های فشرده یکی از منابع ذخیره اطلاعات مانند فلاپی دیسکها میباشند، با این تفاوت که ظرفیت ذخیرهسازی اطلاعات در لوح های فشرده بسیار بیشتر میباشد. به دلیل ثبت دیجیتالی آن، محصولات امنیتی در بالاترین سطح کیفی خود هستند و نیز احتمال از بین رفتن آن بسیار کم است. تکنولوژیهای مشابه، لوح فشرده را به عنوان یک واسطه جاذب برای حمل انواع اطلاعات دیجیتالی ساختهاند. با اینکه لوح های فشرده به قدر کافی قابل اعتماد نیستند، اما کمیت حجیم آن میتواند برای ما سریع و مقرون به صرفه باشد. انحصار تولید لوح های فشرده در ابتدا در دست دو شرکت فیلیپس و سونی بود. ولی در آن زمان استاندارد خاصی برای تولید این لوح های فشرده وجود نداشت و نیز این مشکل نیز وجود داشت که هر کسی که میخواست از این لوح های فشرده استفاده نماید، میبایست فقط از دیسکها و دیسکخوانهای مربوط به یکی از این دو شرکت استفاده مینمود. در حال حاظر تمامی لوح های فشرده با استفاده از یک استاندارد جهانی (ایزو) ساخته میشوند و در هر جایی میتوان از این لوح های فشرده استفاده نمود و به راحتی در سرتاسر دنیا این لوح های فشرده در دسترس میباشند. به خاطر رشد فوقالعاده و کامل دیسک های فشرده و تکنولوژی، در حال حاضر لوح های فشرده تکامل یافته و کامل شدهاند. استانداردهای اساسی دیسک فشرده و قانونهای مرتبط به آن در کتاب قرمز (Audio)، کتاب زرد (دیسک فشرده ROM)، کتاب نارنجی (دیسک فشرده R) ،کتاب سبز (دیسک فشرده I) و سایر تکنولوژیها ، معین و جمعآوری شده است. به هر حال هر استاندارد رسمی و غیر رسمی از این قوانین معین شده در کتابهای صنعتی اصلی تبعیت میکنند...
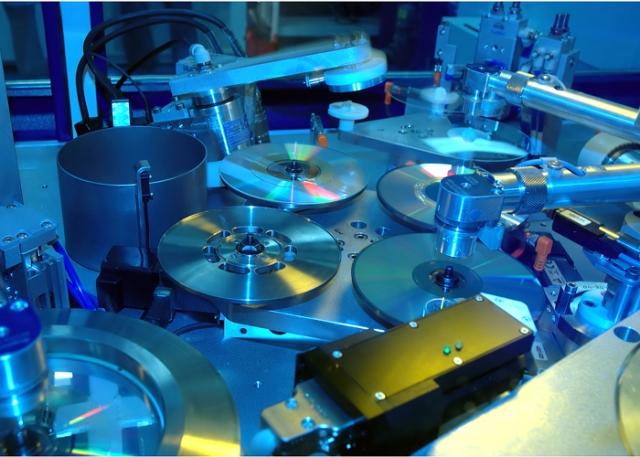
پروژه مورد نظر مشتمل بر هفت (7) فصل، 139 صفحه، تایپ شده، به همراه تصاویر رنگی، دیاگرام، جهت دانلود قرار داده شده تا به راحتی کاربر بتواند آن را به میل خود در صورت نیاز ویرایش نماید. همچنین به همراه فایل word، فایل Powerpoint این پروژه نیز جهت سمینار و ارائه کنفرانس در کلاس ضمیمه شده است و فصل بندی پروژه به ترتیب زیر می باشد:
- فصل 1: آشنایی با انواع لوح فشرده و ویژگیهای آن
- فصل 2: مسترینگ فلزی مستقیم
- فصل 3: تولید توسط استمپر
- فصل 4: فتوپلیمریزاسیون
- فصل 5: فتولیتوگرافی
- فصل 6: خواندن سریع پس از اثر گذاری
- فصل 7: نتیجه گیری

جهت دانلود پروژه تکنولوژی تولید و ساخت لوح فشرده بر لینک زیر کلیک نمایید:
پروژه تکنولوژی تولید و ساخت لوح فشرده